[3DGS] SplaTAM: Splat, Track & Map 3D Gaussians for Dense RGB-D SLAM
Paper Information
- Title : SplaTAM: Splat, Track & Map 3D Gaussians for Dense RGB-D SLAM
- Journal : CVPR 2024
- Date : Apr, 2024 (v3)
- Author : Nikhil Keetha et al.

CVPR 2024 Open Access Repository
SplaTAM: Splat Track & Map 3D Gaussians for Dense RGB-D SLAM Nikhil Keetha, Jay Karhade, Krishna Murthy Jatavallabhula, Gengshan Yang, Sebastian Scherer, Deva Ramanan, Jonathon Luiten; Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern R
openaccess.thecvf.com

Abstract
Dense SLAM
- Crucial for robotics.
- Current methods are limited by non-volumetric or implicit representations.
Main Method: SplaTAM
- Enables high-fidelity reconstruction from a single unposed RGB-D camera.
- Provides a simple online tracking and mapping system.
- Utilizes a silhouette mask for improved accuracy.
Results
- Achieves fast rendering and dense optimization.
- Delivers 2× better performance in camera pose estimation, map construction, and novel-view synthesis.
1. Introduction
SLAM : estimating the poose of visioonn sensor and map of the environment
During past 30 decades, main research of SLAM => map representation
various map representation
- sparse representation
- dense representation
- neural scene representation
In terms of dense visual SLAM, the most successful handcrafted represenatations are points, surfels/flats, and signed distance fields.
tracking explicit representations' shortcoming
1) availabiltiy of rich 3D geometrc features and high-framerate captures
2) only reliably explain the observed parts of the scene
=> leads to arise NeRF SLAM algorithm
NeRF SLAM
Advantage : high-fidelity global map & image reconstruction, capture dense photometric information
Disadvantage : computationally inefficient, not easy to edit, not model spatial geometry explicitly, catastrophic forgetting
=> How can design better using explicit volumetric representation? : radiance field based on 3D Guassians
The benefits of SplaTAM
- fast rendering and rich optimization
: can be rendered at speeds up to 400FPS
key of increasing of speed : rasterization of 3D primitives
1) removal of view-dependent appearance
2) use of isotropic Gaussians
3) dense photometric loss for SLAM - Maps with explicti spatial extent
spatial frontier of the exiting map : can identify a new image frame's location by rendering a silhouette
(This crucial for camera tracking) - Explicit map
simply increase the map capacity by adding more Gaussians.
explicit volumetric representation -> allow to edit parts of the scene & render photo-realistic images - Direct Gradient flow to parameters
this enables fast optimization
SOTA for camera pose estimation, map estimaton and novel-view synthesis
2. Related Work
2.1. Traditional approaches to dense SLAM
a variety of representations
- 2.5D images
- signed-distance functions
- gaussian mixture moodels
- cirular surfels
However, 2D surfels are discontinuous -> no differentiable.
=> we use voulmetric scene representations in the form of 3D Gaussians (continuous)
2.2. Pretrained neural network representations
This approaches range from directly integrating depth predictions
2.3. Implicit Scene Representations
- iMAP : first performed both tracking and mapping using neural impliciti representations
- NICE-SLAM : use of hierarchical multi-feature grids
- Point-SLAM : perform volumetric rendering with feature interpolation
However, implict representations limits efficiency
=> we use explicit volumetric radiance model
2.4. 3D Gaussian splatting
3D Guassians : promising 3D scene representation
In model dynamic scene : require that each input frame has an accurately known with 6-DOF motion
=> we removes this constraints
3. Method
SplaTAM : the first dense RGB-D SLAM soluction to use 3D Guassian Splatting
3.1. Guassian Map Representation
Guassan : ( c, µ, o, r )

color : c = (r, g, b) ,
center position : µ ∈ R^3,
radius : r
opacity : o ∈ [0,1].
using only view-dependent color and forcing Gaussians to be isotropic
3.2. Differentiable Rendering via Splatting
core of our approach : render high-fidelity color, depth, silhouette images from our Gaussian Map in a differentiable way
1. rendered color of pixel p = (u, v)

- f_i(p) : computed as Eq.1
- µ , r : the splatted D Gaussian in pixel-space

- K : (known) camera intrinsic matrix
- E_t : extrinsic matrix capturing the rotation and translation
- f : focal length
- d : depth of i th Gaussian
2. rendered depth of pixel p = (u, v)

3. silhouete image of pixel p = (u, v)

3.3. SLAM System
fitted frames : 1 to t
new RGB-D frames : t+1
- Camera tracking : minimize image and depth reconstruction error
- Gaussian Densification : add new guassians to the map based on the rendered silhouette and input depth
- Map Update : given the frame 1 to t_1, update parameters of all the Gaussians by minimizing error

3.4. Initialization
(In first frame)
- tracking : set is skipped & camera pose is set to identity.
- densification : silhouette -> empty, add new gaussians
(depth : unprojection of that pixel depth / o =0.5
/ r = one-pixel radius upon projection b dividing the depth by the focal length)

3.5. Camera Tracking
Camera tracking aims to estimate the camera pose of the current incoming online RGB-D image
Camera parameters initialized using the following

Then, camera pose is updated iteratively by gradient-based optimization and minimize the following loss

- apply this loss only sell-optimized parts of the map by using our rendered visibility silhouette
- give value of 1 if there is no GT depth for a pixel
3.6. Gaussian Densification
initialize new gaussians in Map at each incoming online frame
Don't add Gaussian if current Gaussians are already accurate
- indicates where the map isn't adequately dense (S <0.5)
- new geometry > the predicted depth & depth error > lamda * median
3.7. Gaussian Map Updating
This is equivalent to the classic roblem of fitting a radiance field.
However, there are two modifications
- warm-start the optimization from recently constructed map
- do not optimize all previous frames (save each nth frame and select k frames to optimize)
+) we add SSIM loss to RGB rendering & cull useless Gaussian (near 0 opacity or too large)
4. Experimental Setup
4.1. Datasets and Evaluation Settings
- datasets : ScanNet++, Replica, TUM-RGBD, ScanNet
- methods : Point-SLAM, NBICE-SAM
4.2. Evaluation Metrics
- PSNR
- SSIM
- LPIPS
- ATE RMSE (average absolute trajectory error) fr camera pose estimation
4.3. Baselines
main baseline method we compare : Point-SLAM (previous SOTA)
- older dense SLAM approaches : NICE-SLAM, Vox-FUsion, ESLAM
- traditional SLAM : Kintinuous, ElasticFusion, ORB-SLAM2, DROID-SLAM, ORB-SLAM3
5. Results & Discussion
5.1. Camera Pose Estimatiion Results

Overall these camera pose estimation results are extremely promising and show off the strengths of our SplaTAM method.
5.2. Rendering Quality Results


Our approach acheives a good novel-view synthesis result.

Our methods achieve visually excellent results over both scenes for both novel and training view.
5.3. Color and Depth Loss Ablation

5.4. Camera Tracking Ablation

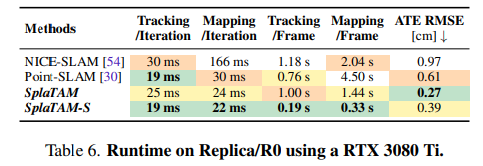
5.5. Runtime Comparison
5.6. Limitations & Future work
Limitation
- sensitiviy to motion blur, large depth noise, and aggressive rotation
Future work
- can be scaled up to large-scale scenes through efficient representations
- remove dependencies that require known camera intrinsic
6. Conclusion
SplaTAM : a novel SLAM system that leverages 3D Gaussians as its underlying map representation to enbable fast renderingand dense optimization
=> achieve SOTA in camera pose estimation, scene reconstruction and novel-view snthesis