[3DGS] 4D Gaussian Splatting for Real-Time Dynamic Scene Rendering
Paper Information
- Title : 4D Gaussian Splatting for Real-Time Dynamic Scene Rendering
- Journal : CVPR 2024
- Author : WU, Guanjun, et al.
https://guanjunwu.github.io/4dgs/
4D Gaussian Splatting for Real-Time Dynamic Scene Rendering
Representing and rendering dynamic scenes has been an important but challenging task. Especially, to accurately model complex motions, high efficiency is usually hard to guarantee. To achieve real-time dynamic scene rendering while also enjoying high train
guanjunwu.github.io

Abstract
Purpose : achieve real-time dynamic scene rendering
Main Method : 4D Gaussian Splatting
How :
- novel explicit representation containing both 3D Gaussian and 4D neural voxels
- decomposed neural voxel encoding algorithm
- lightweight MLP
Result : achieves real-time rendering under high resolutions
1. Introduction
Novel view synthesis (NVS) : render images from any desired viewpoint or timestamp of a scene
NeRF : represents scenes with implicit functions
However, the original NeRF method bears big training & rendering costs
3D-GS : focuses on the static scenes
(Extending 3D-GS to dynamic scenes is difficult)
goal : constructs a compact representation
contributions :
- efficient 4D Gaussian splatting framework
- multi-resolution encoding method
- real-time rendering on dynamic scenes
2. Related Works

2.1. Novel View Synthesis
Much approaches are proposed to represent a 3D object and render novel views
Representations : light field, mesh, voxels, multi-planes
NeRF-based approaches :demonstrate implicit radiance fields
=> accelerates the learning time for dynamic scenes to half an hour
Flow-based methods :
1) adopt warping algorithm to SNV by blending nearby frames
2) adopt decomposed neural voxels (further advancements)
3) treat sampled points in each timestamp individually
=> fast, but dynamic scene X
Our methods:
aims at constructing a highly efficient training and rendering pipeline while maintainting the quality, even for sparse inputs
2.2 Neural Rendering with Point Clouds
Point-cloud-based methods : initially target 3D segmentation and classification
combines approaches for volume rendering => achieving rapid convergence speed for dynamic novel view synthesis.
3D-GS : pure explicit representation and differential point-based splatting methods
Dynamic3DGS : models dynamic scenes by tracking the position and variance of each 3D Gaussian at each timestamp
- memory consumption : O(tN) N // # of 3D Gaussians => storage cost ↑
Our approach (4DGS)
- memory consumption : O(N + F) // F : parameters of Gaussians deformation fields network
- With compact network, results in highly efficient training efficiency and real-time rendering
3. Preliminary
3.1. 3D Gaussian Splatting
: explicit 3D Scene representation in the form of point clouds
covariance matrix ∑ (world space)
(R = Rotation matrix, S : Scaling matrix)

For rendering, We have to project 3D onto 2D.
covariance matrix ∑' (camera space)
(W = viewing transform matrix, J = Jacobian matrix of the affine approximation of the projective transformation)

summary
each gaussian is characterized by the following attributes
- position : X ∈ R3
- spherical harmonic coefficients : C ∈ Rk
- opacity : α ∈ R
- scaling factor : s ∈ R3
- rotation factor : r ∈ R4
All above the values are computed using Gaussian's representation Eq.1
+) For more information about 3D-GS, please refer to the link below
[3DGS] 3D Gaussian Splatting for Real-Time Radiance Field Rendering : Paper Review
Paper InformationSIGGRAPH 2023title : 3D Gaussian Splatting for Real-Time Radiance Field Rendering journal : ACM Transactions on Graphicsauthor : Kerbl, Bernhard and Kopanas, Georgios and Leimkhler, Thomas and Drettakis, Georgehttps://rep
mobuk.tistory.com
3.2. Dynamic NeRFs with Deformation Fields
All the dynamic NeRF algorithms can be formulated as :

- M is a mapping 8D space(x, d, t, λ) to 4D space (c, σ)
- λ : optional input
- d : stands for view-dependency
world-to-canonical mapping :
canonical-to-world mapping :
For more information about NeRF, please refer to the link below.
[Nerf] Nerf : Representing Scenes as Neural Radiance Fields for View Synthesis
Paper InformationECCV 2020 oraltitle : Nerf : Representing Scenes as Neural Radiance Fields for View Synthesisjournal : Communications of the ACMAuthor : Ben Fildenhall, Pratul P. Srinivasan, Matthew tancik et al.https://www.matthewtancik.com/nerf NeRF: N
mobuk.tistory.com
4. Method
4.1. 4D Gaussian Splatting Framework

- view matrix : M = [R, T]
- timestamp : t
- ˆI : novel-view image (rendered by differential splatting)
ˆI = S(M, G′), where G′ = ΔG + G.
- ΔG : deformation of 3D Gaussians
=> ΔG = F(G, t) // F : deformation field network
=> ΔG = D(f), fd = H(G, t), - G' : deformed 3D Gaussians
- G : original 3D Gaussians
4.2. Gaussian Deformation Field Network
Spatial-Temporal Structure Encoder
H : spatial-temporal structure encoder including a multi-resolution HexPlane R(i, j)
=> 6 plane modules Rl(i, j)
H(G, t) = {Rl(i, j), ϕd | (i, j) ∈ {(x, y), (x, z), (y, z), (x, t), (y, t), (z, t)}, l ∈ {1, 2}}.
- tiny MLP ϕd
- R(i, j) ∈ Rh×lNi×lNj
- N : basic resolution of voxel grid
- l : upsampling scale

interp : bilinear interpolation
fd = ϕd(fh).
Multi-head Gaussian Deformation Decoder
D : multi-head gaussian decoder
D = {ϕx, ϕr, ϕs}
- deformation of position : ΔX =ϕx(fd)
- rotation : Δr = ϕr(fd),
- scaling : Δs = ϕs(fd).

Finally we obtained the deformed 3D Gaussians G' = {X′, s′, r′, σ, C}.
4.3. Optimization
3D Gaussian Initialization
fine-tuned in proper 3D Gaussian initialization => initial 3000 iterations , render images with 3D Gaussian I = S(M, G).

Loss Function
L1 color loss, L_tv : grid-based total-variational loss
5. Experiment
- implimentation : Pytorch
- gpu : RTX 3090
5.1. Experimental Settings
Synthetic Dataset
Datasets introduced by D-NeRF
https://github.com/albertpumarola/D-NeRF
GitHub - albertpumarola/D-NeRF
Contribute to albertpumarola/D-NeRF development by creating an account on GitHub.
github.com
Real-world Dataset
Datasets provided by HyperNeRF, Neu3D
https://github.com/google/hypernerf
GitHub - google/hypernerf: Code for "HyperNeRF: A Higher-Dimensional Representation for Topologically Varying Neural Radiance Fi
Code for "HyperNeRF: A Higher-Dimensional Representation for Topologically Varying Neural Radiance Fields". - google/hypernerf
github.com
https://github.com/facebookresearch/Neural_3D_Video
GitHub - facebookresearch/Neural_3D_Video: The repository for CVPR 2022 Paper "Neural 3D Video Synthesis"
The repository for CVPR 2022 Paper "Neural 3D Video Synthesis" - facebookresearch/Neural_3D_Video
github.com
5.2. Results
evalutation metrics : PSNR, SSIM, LPIPS, MS-SSIM, FPS, D-SSIM
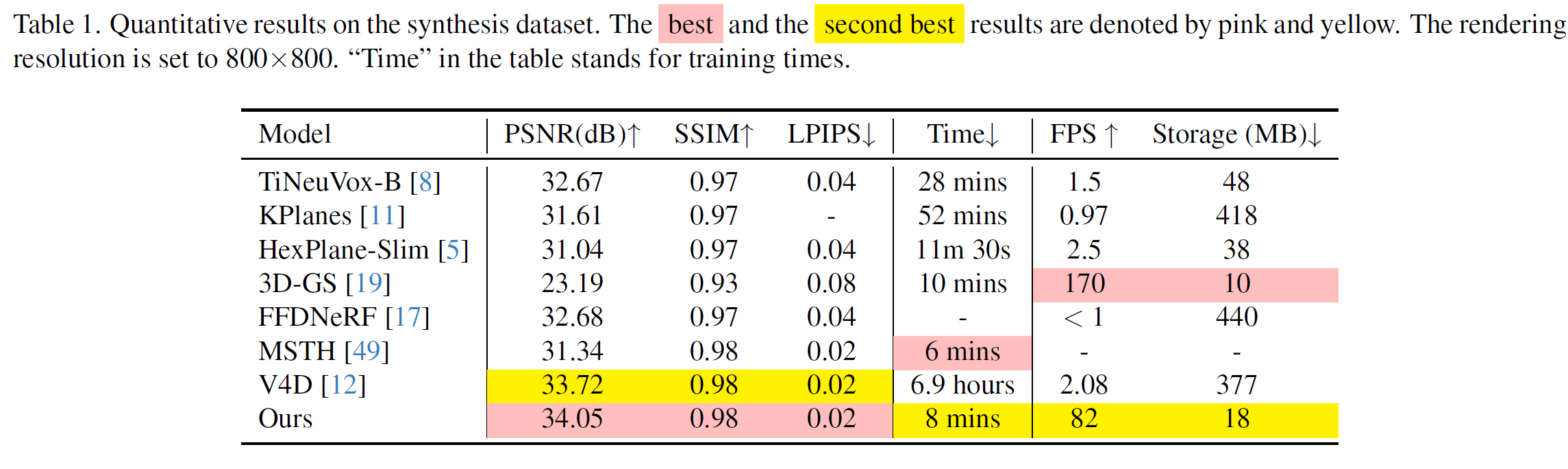
qualtiy of novel view synthesis(Tab. 1.)
- high rendering quality within the synthesis dataset
- fast rendering speeds while keeping low storage consumption
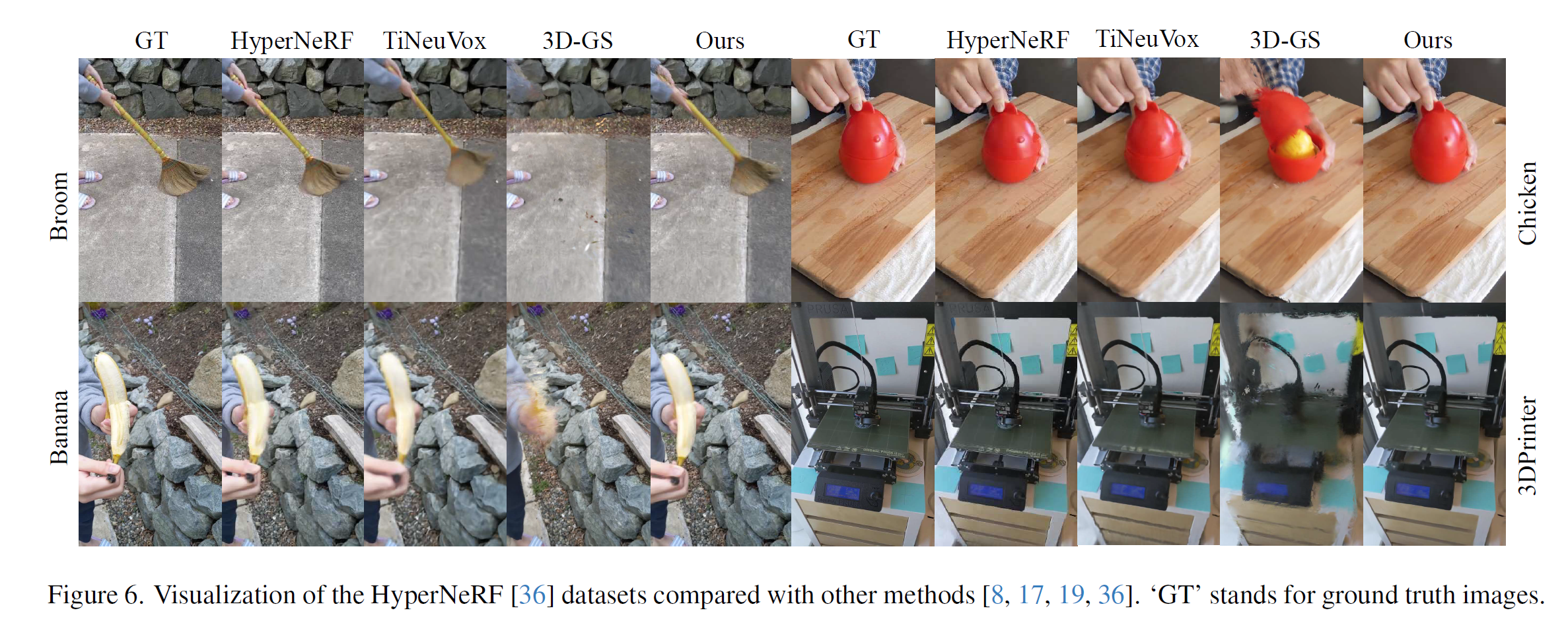
Real-word datasets (Tab. 2. / Tab. 3.)
- comparable rendering quality
- fast convergence
- excel in free-view rendering speed in indoor case
However, multi-cam setups need to improve.

5.3. Ablation Study

- Spatial-Temporal Structure Encoder
- Gaussian Deformation Decoder
- 3D Gaussian Initialization
5.4. Discussions
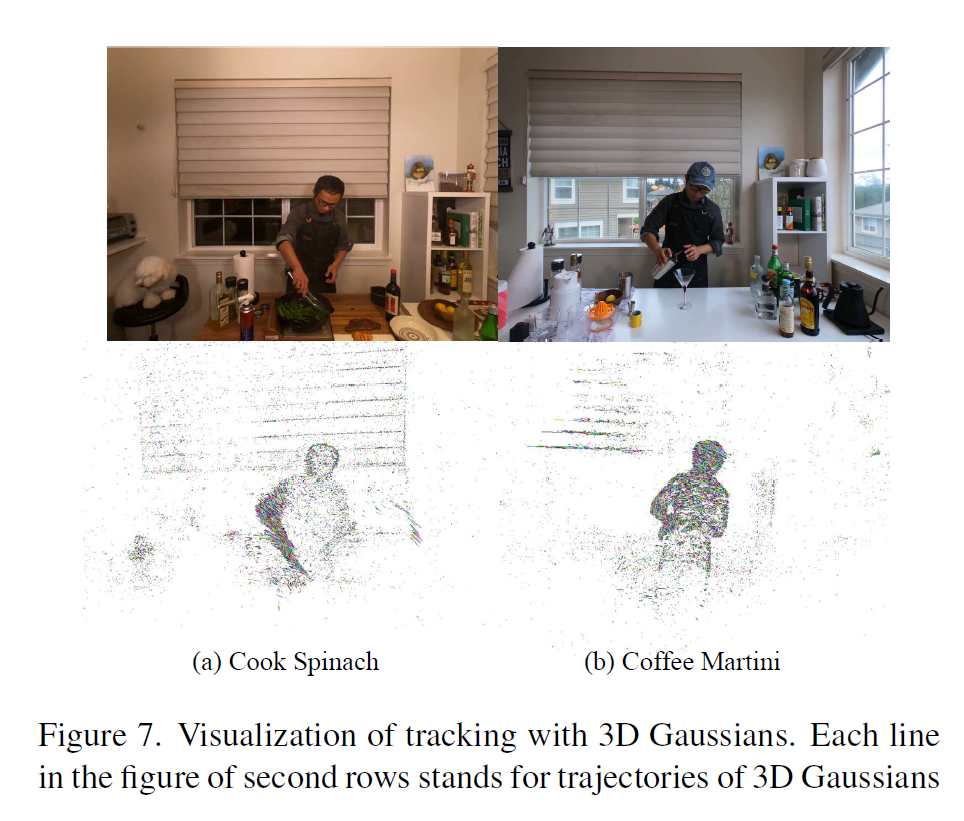
Tracking with 3D Gaussians
This methods : can present tracking object in monocular settings with pretty low storage
Composition with 4D Gaussians

Analysis of Rendering Speed

5.5. Limitation
- weakness in large motions, absense of background points, unprecise camera pose
- not split the joint motion of static and dynamic Gaussian parts under the monocular settings without any additional supervision
- more compact algorithm needs to be designed to handel urban-scale reconstruction
6. Conclusion
This paper proposes 4D Gaussian splatting to achieve real-time dynamic scene rendering
- efficient deformation field network
- adjacent Gaussians connected via a spatial-temporal structure encoder
- connection between Gaussians lead to more complete deformed geometry
=> can model dynamic scenes + have the potential for 4D objective tracking & editing